Skip to content
- Dot-Bot Software Upgrade
- Model Railway Booster Fault Detection
- Dot-Bot Spray Can Upgrade
- Electronic Kalimba
- The Cleaning Bot
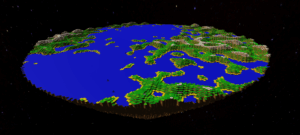
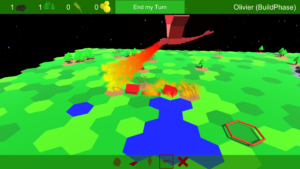
- 3D Terrain Generator
- Dot-Bot Gondola Update
- Custom Development PCB
- Bahnhofs Steuerung 2000
- Ikea Lamp Repair
- Crossword Auto Solver
- 3D Printable Grandfather Clock Weight
- Marshmallow Mystery
- Metal 3D Printed Replacement Gear
- Custom storage shelf
- 3D printed birthday gift
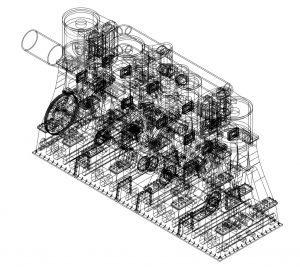
- Titanic’s Engine at 200%
- 3D Printed Valentines Gift 2023
- Desk Fan Repair
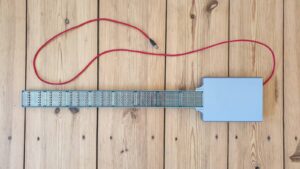
- Electronic Guitar
- 3D Printable Floppy Animal
- 3D Printable Airport Departures Sign
- DOT-BOT 2.0
- 3D Printable Titanic Engine 2.0
- Dot-Bot
- 3D Printed VR Binoculars
- Kalimba Playing Robot
- 3D Printable Magnetic Chess
- Titanic’s steam engine
- Turntable Rendering
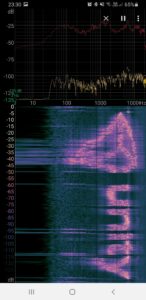
- Convert images to sound and back
- Atondes
- Custom Tesa Roll Cutter
- Hex Tex Mex
- 3D Art from Bugs
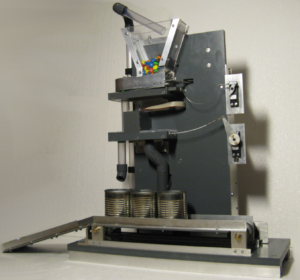
- M&M’s sorting machine