The Dot-Bot is a large scale wall plotter that used counterweights to tension its GT2 belts. When setting up and dismantling the Bot, hanging the weights was always an ordeal (about 10 minutes per station), so with a 3 station setup roughly 1 hour total per drawing session. To optimize this step, I tried several approaches to replace the weights with something more practical, but almost every path turned out to be a dead end. Either too complicated, not durable enough, too bulky, or expensive.
One of the concepts I had in mind was based on the concept of a spring based purely mechanical battery. For this approach, I decided to order several types of springs on AliExpress and started experimenting with them. However, every spring I tested was either too weak or had not enough potential travel. I therefore started experimenting with parallel and serial spring arrangements to change the properties of the springs to fit my needs. To my surprise, this worked extremely well and ended my search for the perfect spring.


Here are two example graphs that I created to visualize this effect. The graphs are not based on real data, only on observation and feel. Due to friction, in practice you do not get a perfect copy of the force graph of a single spring, but it is pretty close.
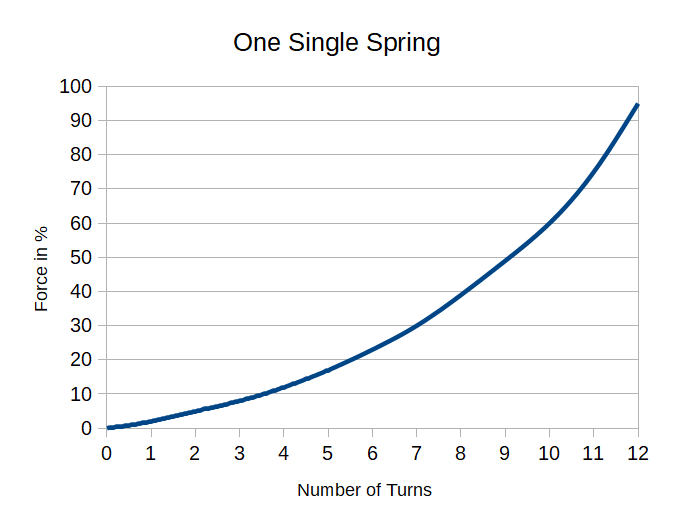
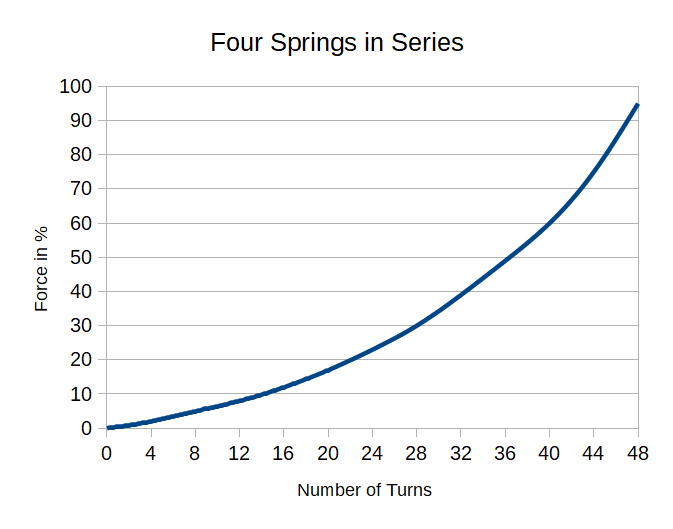
With the concept of serial and parallel springs in mind, I had to choose for one spring that I would then order in bulk. I decided to go for the strongest and biggest coil spring I ordered (0.25mm x 8mm x 4200mm). Already on its own, it was able to store a lot of energy, but it was lacking the number of rotations nessesary for my application. During the first two turns, this type of spring held little energy, and during the last two rotations, the spring got to stiff. Using springs at their load capacity comes with a major impact to their lifespan. I therefore decided that I would only plan with 8 usable turns per spring. This meant that 3 springs would already have been enough to fulfill my need for 22 rotations (3×8 = 24), but I opted to go for a lot of additional headroom and use 4 springs instead. This would give me a capacity of 32 rotations (4×8 = 32).

However, the biggest challenge still remained, namely how to connect springs in series to form a durable energy storage solution.

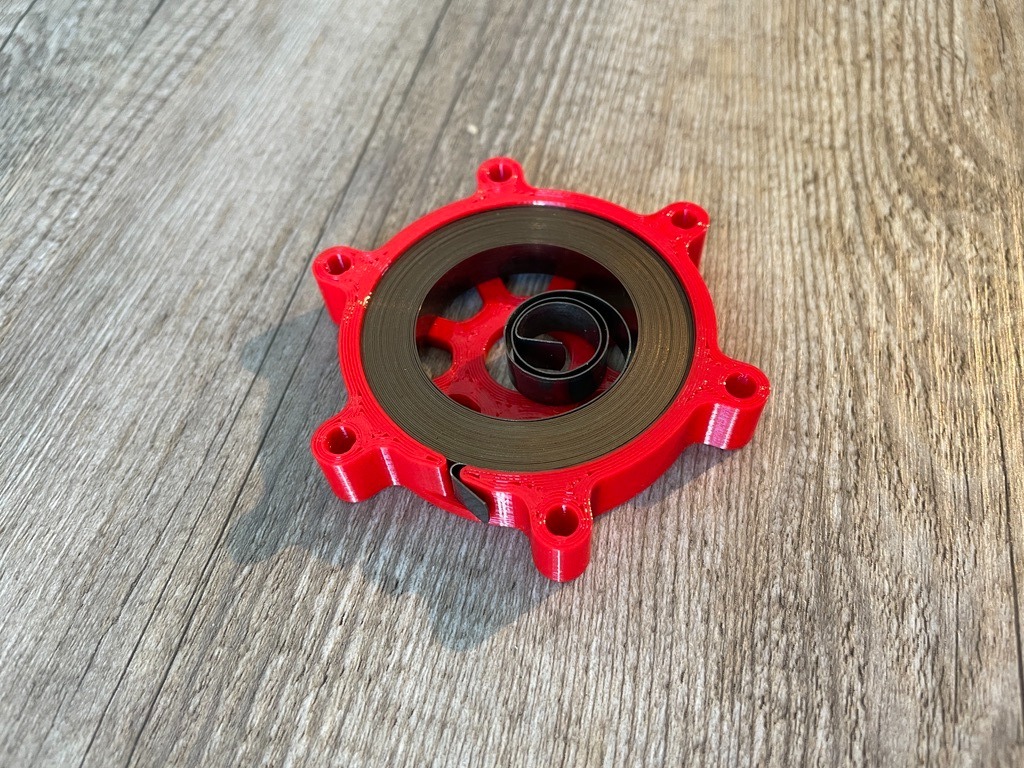
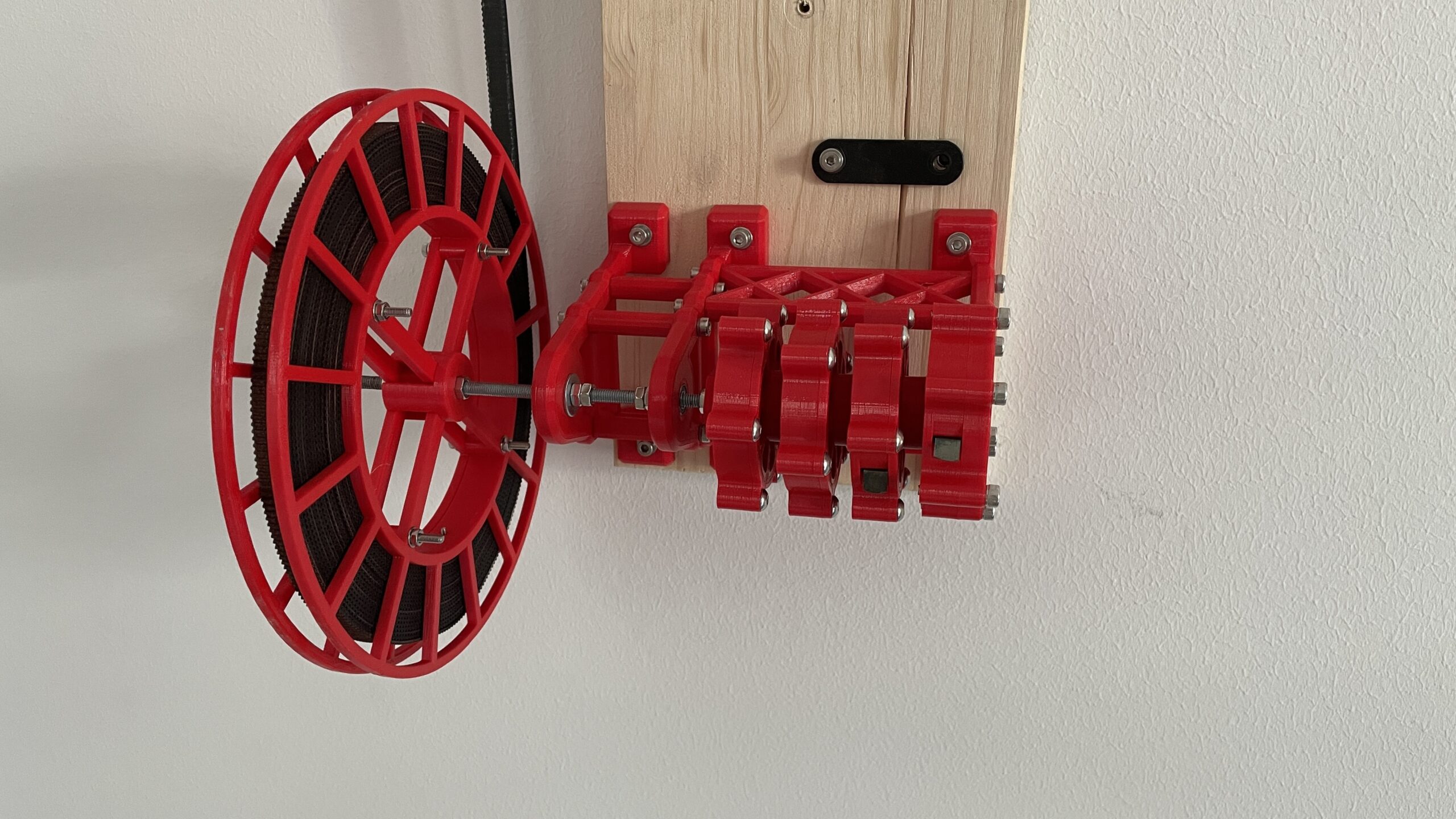
I call the result a Spring Battery. Its most important properties are:
- Scalable – An arbitrary number of stages can be used
- Modular – Parallel and serial springs can be combined in any configuration
- Gravity-Defying – Sprin Batteries work regardless of their orientation
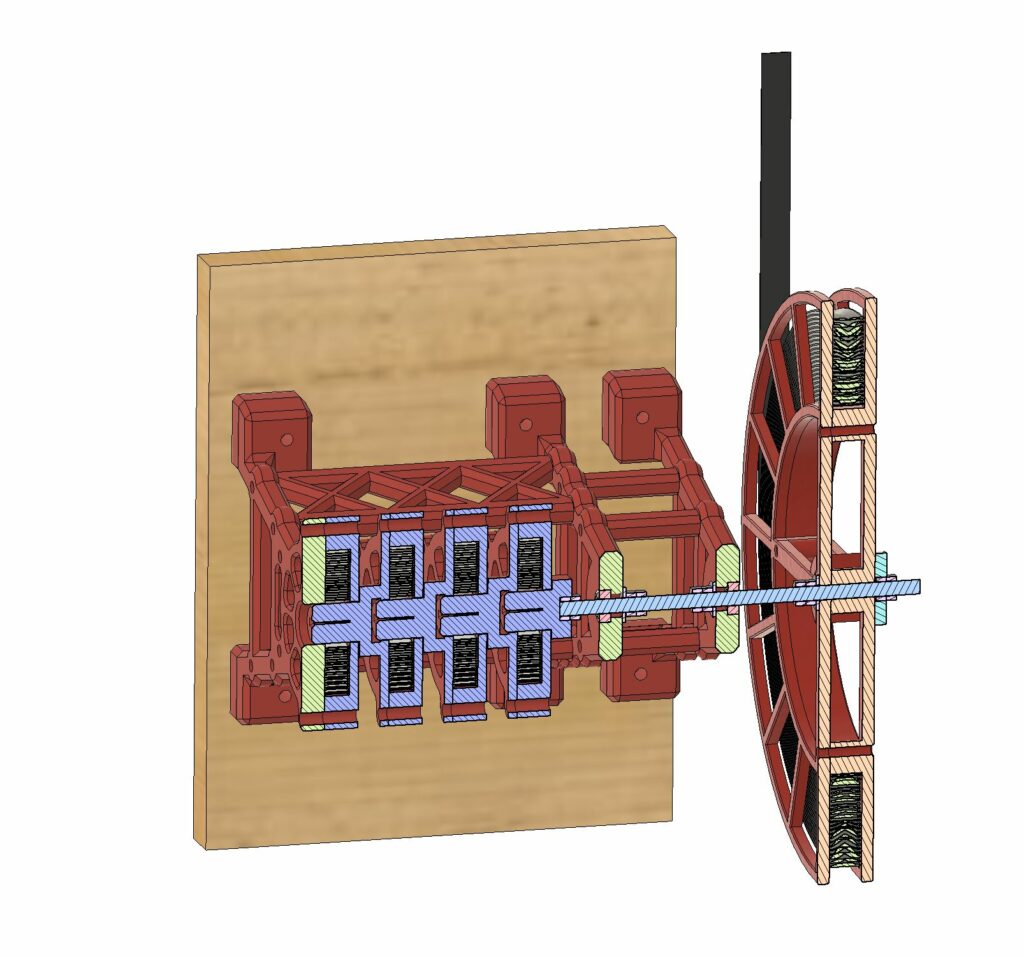
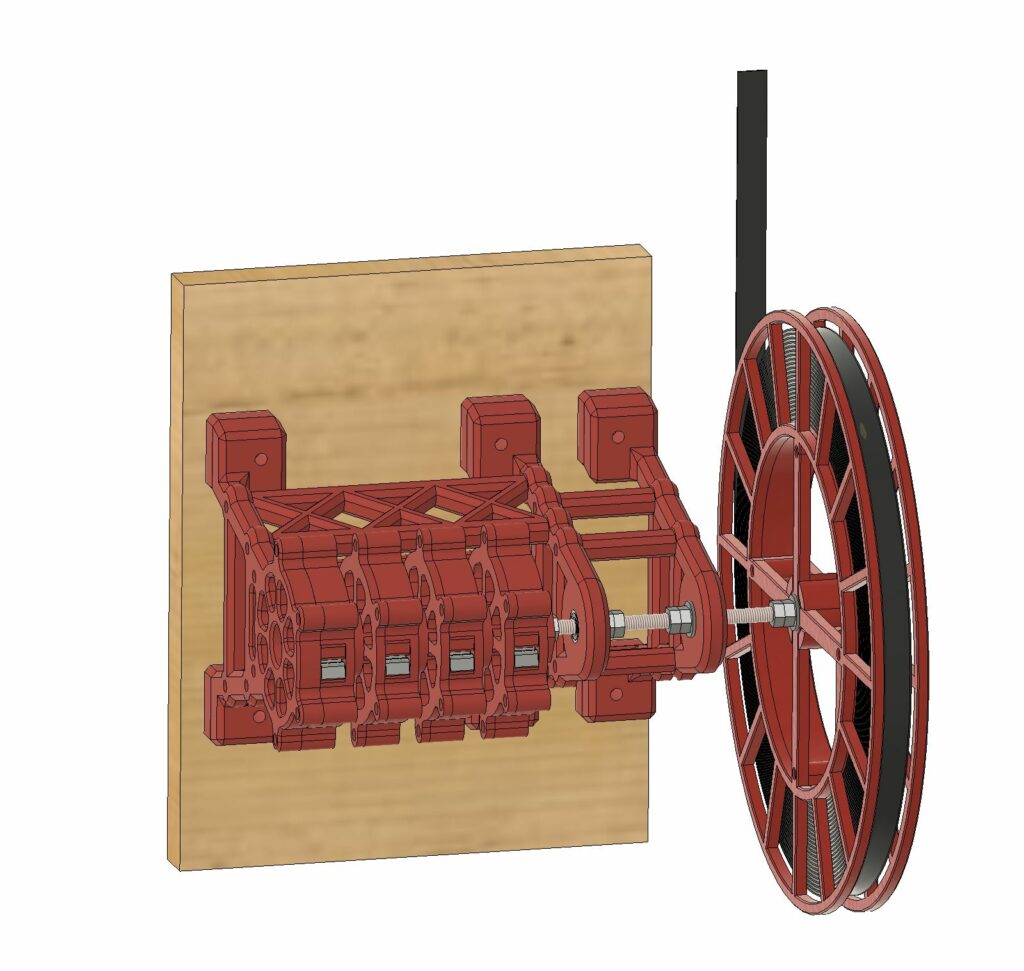
Each Spring Battery unit is anchored to the base by the first case on one side and connected to the shaft, from which it receives and releases its energy, by the final hub on the other side. The hub of each intermediate stage is connected to the housing of the next stage. This means there are only 4 different parts, which can be rearranged to create springs with custom force profiles.
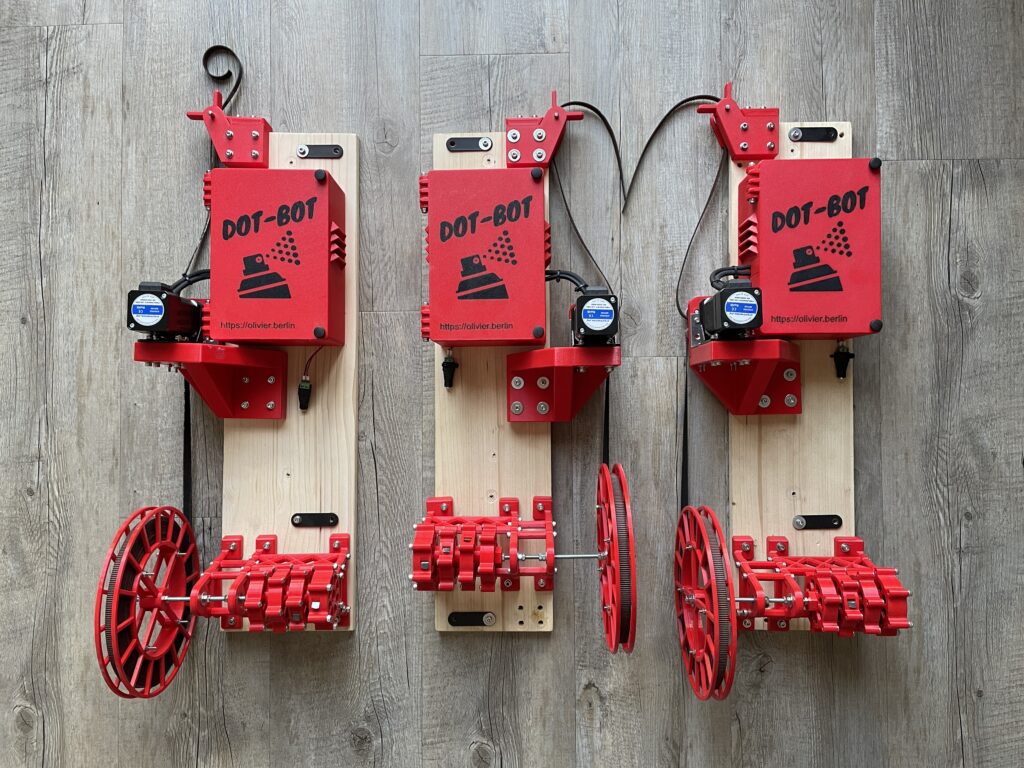
All of the parts are 3D printable, and require no support materials or post processing. Simply printing them, inserting the springs and screwing the stages together is enough. At the time of writing of this blog post, several hours of small-scale tests and one full scale test have been concluded, where 3 Spring Battery units were working perfectly for multiple days, reeling up and down 10 meters of GT2 belts countless times.

This project was a challenging but also interesting excursion for me. Designing mechanical systems around springs and experimenting with forces that I would consider dangerous is not something that I do regularly. I find the fact that I was able to come up with something that works this well deeply satisfying.
If you have a mechanical problem that I might be able to solve using CAD and/or 3D printing, do not hesitate to contact me.